美國國防高等研究計畫署(DARPA)在英特爾實驗室及其合作單位西班牙巴塞隆納電腦視覺中心、美國德州大學奧斯汀分校的支援下,授予Intel為越野自駕車開發先進模擬解決方案的機會。本計畫(RACER-Sim)讓複雜環境中的機器人具備彈性—模擬的能力與自主性,創造下一世代的越野模擬平台,以便顯著地降低開發成本,彌補越野車從虛擬到真實環境的差距。
「英特爾實驗室已透過包含CARLA模擬器在內的數個專案,在先進自駕車模擬上取得進展,我們很榮幸能夠參與RACER-Sim,繼續為越野機器人和自駕車的下個領域做出貢獻。我們匯集來自電腦視覺中心和德州大學奧斯汀分校的知名專家團隊,目標是創造一個多功能且開放的平台,加速所有環境與條件下的越野機器人發展。」
—German Ros,英特爾實驗室總監
為何重要:在自動駕駛方面,公路和越野部署之間的差距仍相當大。現今已有許多模擬環境,但甚少為越野自駕車開發規模和速度最佳化。此外,真實世界展示仍是驗證系統效能的主要方式。
越野自駕車需要面對實質性挑戰,包含缺乏路網和具有岩石和各種類型植被的極端地形,以及其它各種挑戰,如此極端的條件讓開發和測試變得昂貴且緩慢。RACER-Sim計畫旨在透過提供先進模擬技術來解決這項問題,以便開發和測試解決方案,減少AI驅動自主系統的部署時間和驗證。
如何工作:RACER-Sim包含兩個階段共48個月,目標是加速設計越野自駕車的整體研究和開發過程。在第一階段當中,英特爾將重點放在創造新的模擬平台和地圖產生工具,以前所未有的規模,採用最高精度(例如物理、傳感器建模、地形複雜度……等)模擬複雜的越野環境。大規模建立模擬環境,在傳統上需要大量資源,同時也是模擬工作流程當中最大的挑戰之一。英特爾實驗室模擬平台將實現未來地圖的客製化,包含僅需點擊幾下,即可建立超過10萬平方英里的大規模新環境。
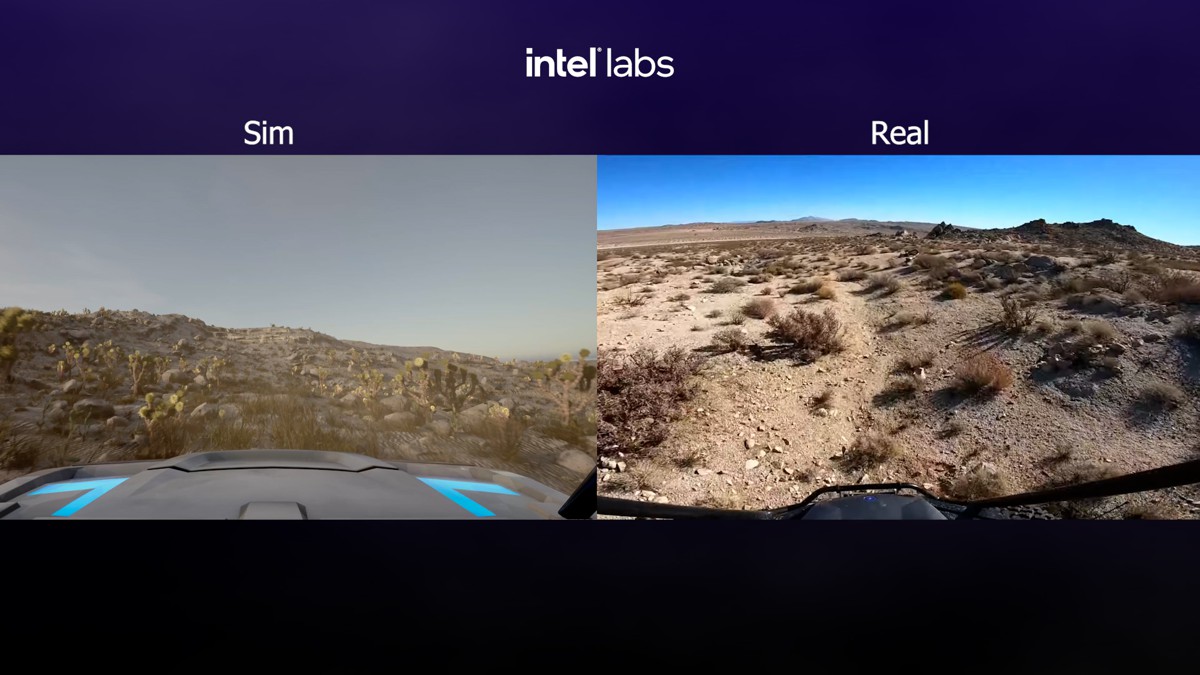
在第二階段,英特爾實驗室將與RACER 合作夥伴齊心協力,在不使用物理機器人的情況下,實作新的演算法來加速研究和開發過程。團隊將在模擬中驗證機器人的效能,節省可觀的時間和資源。第二階段也將包含新開發的sim2real 技術(其概念是在模擬當中訓練機器人以便獲取技能,並將技能轉移至相應的真實機器人系統),讓越野自駕車能夠直接從模擬當中獲得訓練。
英特爾預期這些新的模擬工具,能夠顯著地改善使用虛擬測試的自主系統開發,降低傳統測試和驗證協議相關的風險、成本和耽擱的時間。未來,模擬平台將超越驗證範疇,建立可在真實世界當中實作的AI模型。
更多內容:英特爾實驗室(媒體資料)
「英特爾實驗室已透過包含CARLA模擬器在內的數個專案,在先進自駕車模擬上取得進展,我們很榮幸能夠參與RACER-Sim,繼續為越野機器人和自駕車的下個領域做出貢獻。我們匯集來自電腦視覺中心和德州大學奧斯汀分校的知名專家團隊,目標是創造一個多功能且開放的平台,加速所有環境與條件下的越野機器人發展。」
—German Ros,英特爾實驗室總監
為何重要:在自動駕駛方面,公路和越野部署之間的差距仍相當大。現今已有許多模擬環境,但甚少為越野自駕車開發規模和速度最佳化。此外,真實世界展示仍是驗證系統效能的主要方式。
越野自駕車需要面對實質性挑戰,包含缺乏路網和具有岩石和各種類型植被的極端地形,以及其它各種挑戰,如此極端的條件讓開發和測試變得昂貴且緩慢。RACER-Sim計畫旨在透過提供先進模擬技術來解決這項問題,以便開發和測試解決方案,減少AI驅動自主系統的部署時間和驗證。
如何工作:RACER-Sim包含兩個階段共48個月,目標是加速設計越野自駕車的整體研究和開發過程。在第一階段當中,英特爾將重點放在創造新的模擬平台和地圖產生工具,以前所未有的規模,採用最高精度(例如物理、傳感器建模、地形複雜度……等)模擬複雜的越野環境。大規模建立模擬環境,在傳統上需要大量資源,同時也是模擬工作流程當中最大的挑戰之一。英特爾實驗室模擬平台將實現未來地圖的客製化,包含僅需點擊幾下,即可建立超過10萬平方英里的大規模新環境。
在第二階段,英特爾實驗室將與RACER 合作夥伴齊心協力,在不使用物理機器人的情況下,實作新的演算法來加速研究和開發過程。團隊將在模擬中驗證機器人的效能,節省可觀的時間和資源。第二階段也將包含新開發的sim2real 技術(其概念是在模擬當中訓練機器人以便獲取技能,並將技能轉移至相應的真實機器人系統),讓越野自駕車能夠直接從模擬當中獲得訓練。
英特爾預期這些新的模擬工具,能夠顯著地改善使用虛擬測試的自主系統開發,降低傳統測試和驗證協議相關的風險、成本和耽擱的時間。未來,模擬平台將超越驗證範疇,建立可在真實世界當中實作的AI模型。
更多內容:英特爾實驗室(媒體資料)