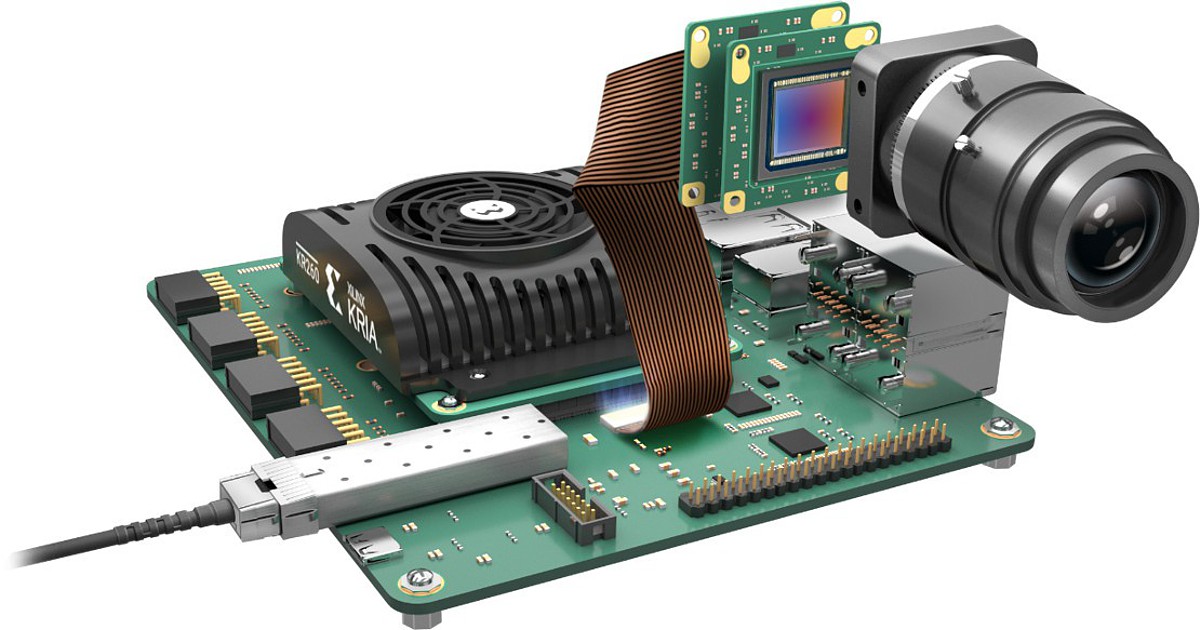
Kria KR260入門套件能夠快速開發用於機器人和工業自動化的硬體加速應用
相較基於對手GPU的解決方案,帶來近5倍的生產力、高達8倍的每瓦效能提升並降低3.5倍的延遲
相較基於對手GPU的解決方案,帶來近5倍的生產力、高達8倍的每瓦效能提升並降低3.5倍的延遲
AMD(NASDAQ: AMD)宣布推出 Kria KR260 機器人入門套件,為Kria自行調適系統模組(system-on-module, SOM)和開發者套件產品組合的最新成員。作為一款可擴展、開箱即用的機器人開發平台,Kria KR260 整合現有的Kria K26自行調適SOM,以提供無縫的生產部署途徑。藉由對原生ROS 2的支援、機器人應用開發的標準框架、為機器人及工業解決方案預先建構的介面,這款新的SOM入門套件能實現快速開發機器人、機器視覺和工業通訊與控制的硬體加速應用。

AMD工業、視覺、醫療與科學資深市場總監Chetan Khona表示:「Kria KR260機器人入門套件建立在我們為AI及嵌入式開發者提供的Kria SOM和KV260視覺AI入門套件取得的成功之上,為機器人專家提供完整的開箱即用型解決方案,從而助力這一快速發展的應用領域。機器人專家現在可以運用在一小時內啟動並執行需要的所有介面及功能的平台,在標準的開發環境中工作。KR260入門套件是一款加速機器人創新、輕鬆付諸構思並大規模生產的理想平台。」
產業分析公司Omdia預測,在2019年至2025年間,機器人元件市場將以20.4%的年複合增長率(CAGR)成長,到2025年,全球市場整體收入將增至約1,260億美元 註1。相較基於NVIDIA GPU的解決方案,Kria KR260端對端自行調適機器人平台預計能帶來高出近5倍的生產力提升 註2。此外,相較於精簡晶片設計(chip-down design),Kria SOM產品組合加速設計週期,得以將部署時間縮短長達9個月,讓各類開發人員即使不具備FPGA專業知識,也能快速輕鬆地開始使用。
完整的工業解決方案
KR260硬體平台為機器人和工業解決方案提供預先建構介面,結合不斷新增加速應用的AMD賽靈思應用商店,可實現輕鬆評估與無縫部署途徑。

Kria機器人堆疊(KRS)是KR260設計體驗的核心,讓機器人社群能更容易獲益於自行調適運算。KRS是整合機器人庫和實用工具的組合,運用硬體來加速Kria SOM工業級機器人解決方案的開發、維護和商業化。具備低延遲特性及自行調適運算架構的Kria SOM結合KRS和ROS 2後,能夠提供相較基於對手GPU的解決方案8倍的每瓦效能提升 註3 和降低高達3.5倍的延遲 註4。
此外,KR260支援廣受採用的Ubuntu嵌入式作業系統,並與Canonical提供的Ubuntu Linux Desktop(22.04)最新長期支援(LTS)版本和ROS 2 Humble Hawksbill相容。
AMD與Open Robotics攜手合作,Open Robotics是ROS 2與其他機器人開放軟體和硬體平台的創建者,致力於驗證與確保為機器人社群的ROS 2充分合規。
Open Robotics執行長Brian Gerkey表示:「Kria SOM系列和KR260入門套件為機器人社群帶來效能、靈活性與快速開發時間的出色組合。使用者可以創建軟體定義的硬體,並打造高每瓦效能、安全、高能源效率且靈活應變的解決方案。Open Robotics非常高興與AMD賽靈思合作,共同瞭解並滿足機器人專家運用KR260開發平台及硬體加速開發全新機器人應用的需求。」
定價與供貨時程
Kria KR260機器人入門套件定價349美元,已可向AMD及其全球經銷商訂購。KR260入門套件擴充現有Kria KV260視覺AI入門套件,為設計視覺應用提供簡單易用的開發平台。
註1:市場報告:Robotic Components by Tractica | Omdia,發佈日期:2020年第2季。
註2:測試於2021年12月1日在使用包括Isaac ROS SDK 4.6.1的Nvidia Jetson AGX Xavier開發套件和Jetson Nano開發套件的測試系統上進行;基於Kria K26 SOM的Kria KV260入門套件使用Vitis統一軟體平台2021.2和Kria機器人堆疊。開發時間基於使用ROS 2設定工具鏈、主機程式碼的交叉編譯以及實現兩個功能的加速器doublevadd_publisher和accelerated_doublevadd_publisher創建與建構,可在GitHub – ros-acceleration/acceleration_examples: ROS 2 package examples demonstrating the use of hardware acceleration.獲得。
註3:測試於2022年2月1日在使用包括Isaac ROS SDK 4.6.1的Nvidia Jetson AGX Xavier開發套件的測試系統上進行;基於Kria K26 SOM的Kria KV260入門套件使用Vitis統一軟體平台2021.2和Kria機器人堆疊。ROS Perception Stack中的Rectify和Resize函數在Kria和Nvidia平台上加速並測試功率和效能,可在GitHub – ros-acceleration/acceleration_examples: ROS 2 package examples demonstrating the use of hardware acceleration.獲得。
註4:測試於2022年2月1日在使用包括Isaac ROS SDK 4.6.1的Nvidia Jetson Nano開發套件的測試系統上進行;基於Kria K26 SOM的Kria KV260入門套件使用Vitis統一軟體平台2021.2和Kria機器人堆疊。ROS Perception Stack中的Rectify和Resize函數在Kria和Nvidia平台上加速並測試執行時間,可在GitHub – ros-acceleration/acceleration_examples: ROS 2 package examples demonstrating the use of hardware acceleration.獲得。